
被动式短波红外单像素成像系统是一种利用环境中自然存在的短波红外辐射,通过特殊的光学收集系统和光调制手段,结合单像素探测器和先进算法等,对目标场景进行成像的技术体系。
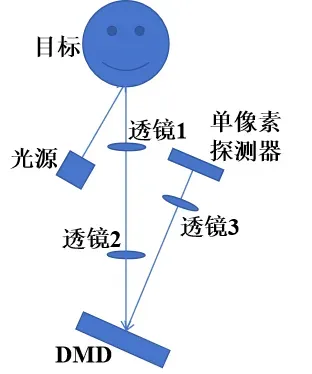
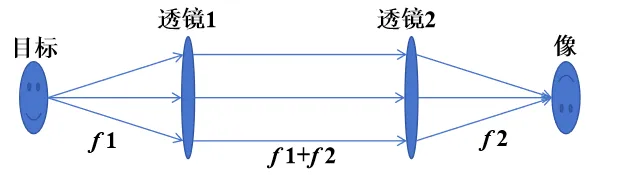
被动式单像素成像系统主要由一个主动照明光源、三个透镜(焦距分别为f 1, f 2, f 3)、一台数字微镜(DMD)空间光调制器和一台单像素探测器组成。如图1所示:
1、标定主动照明光源位置,使照明光均匀覆盖目标。
2、通过4f成像建立目标到DMD的光学共轭关系,4f成像使用两个透镜实现,焦距分别为f 1和f 2。
3、在DMD上加载预设的随机二值化编码,编码随时序切换,并计算投影图像宽度(x1)和单像素探测器探测面宽度(x2)之比。
4、通过单透镜成像实现DMD与单像素探测器间的光学共轭,设单透镜至DMD距离为L1,单透镜至探测器距离为L2,L1和L2满足单透镜成像公式: ![]() ,同时应满足
,同时应满足![]() 。DMD中心,透镜中心和单像素探测器中心应共线。其中,单像素探测器通过采集卡将探测结果传输至计算机。
。DMD中心,透镜中心和单像素探测器中心应共线。其中,单像素探测器通过采集卡将探测结果传输至计算机。
5、系统通过多次编码和单像素采集的方式实现对单个目标的单像素成像,编码数量和采集次数约为编码像素数的10%。软件算法通过对单像素探测器采集的光强序列依编码图像解码获取目标图像。
以上整个过程主要涉及的算法和技术包括GAP-TV算法、随机波前编码等。
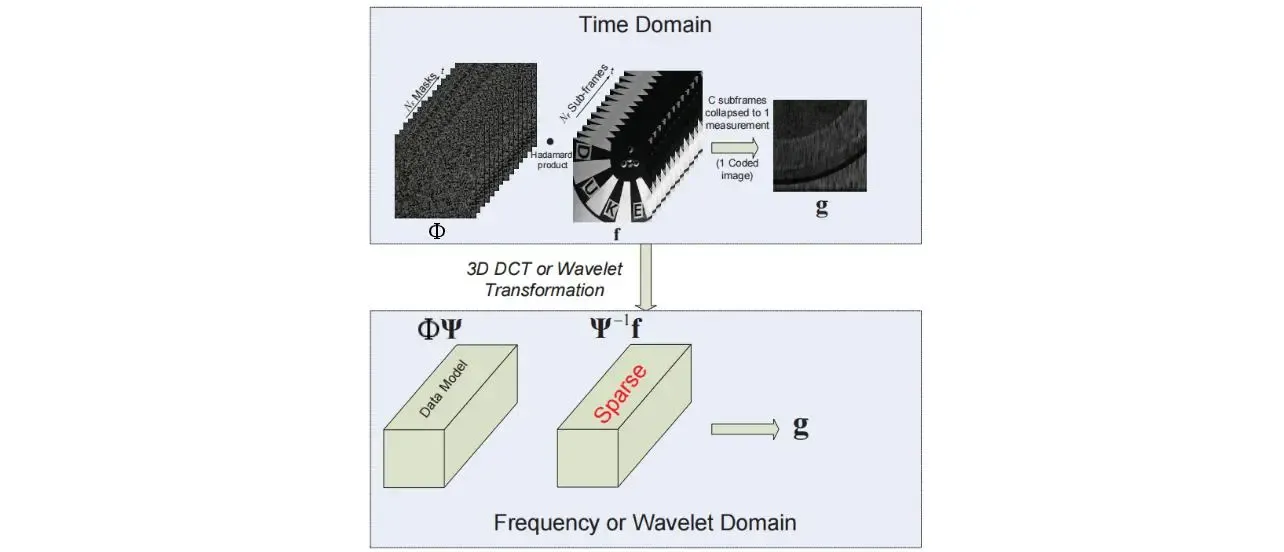
广义交替投影(Generalized Alternating Projection)算法是一种通用的重建算法,GAP利用了两个凸集上的欧几里得投影,分别增强了数据的保真度和结构的稀疏性,它不需要目标场景的先验知识,能够有效地缩放延迟图像的大小和压缩比例。此外,随着算法的进行,GAP算法产生的结果单调地收敛于真值。在广泛的实验中普遍观察到单调性,并在正向模型的一组充分条件下建立了理论性。重建的子帧在连续迭代中不断改进,用户可以随时停止计算以获得中间结果,且用户可以通过恢复计算来继续改进重建。图2说明了GAP算法的基本原理。
下面是 GAP 算法的主要步骤:
- 线性流形
数据保真度通过投影到![]() 保证,这是由所有合格的高速帧组成的线性流形,可以按照正向模型
保证,这是由所有合格的高速帧组成的线性流形,可以按照正向模型![]() 集成到观测的快照g中。
集成到观测的快照g中。
换句话说,![]() 是一个未确定的线性方程组的解集,它可以通过利用变换域中f的结构稀疏性来消除歧义。
是一个未确定的线性方程组的解集,它可以通过利用变换域中f的结构稀疏性来消除歧义。
- 加权值

设![]() ,
,![]() ,
,![]() 分别是沿两个空间坐标和时间坐标的正交变换矩阵。帧f在
分别是沿两个空间坐标和时间坐标的正交变换矩阵。帧f在![]() 中表示为:
中表示为:
![]()
将变换系数![]() 划分为m个不相交子集
划分为m个不相交子集![]() ,
,![]() ,每组
,每组![]() 的权重为正数
的权重为正数![]() ,其中
,其中![]() ,是系数指数的划分。当
,是系数指数的划分。当![]() 是离散余弦变换时,选择权重
是离散余弦变换时,选择权重![]() ,其中
,其中![]() 是系数指数的划分。当
是系数指数的划分。当![]() 是离散余弦变换时,选择权重
是离散余弦变换时,选择权重![]() 来强调低频系数(不强调高频系数);或者当
来强调低频系数(不强调高频系数);或者当![]() 是小波变换时,强调粗尺度系数(不强调细尺度系数)。
是小波变换时,强调粗尺度系数(不强调细尺度系数)。
一个大小为C的加权值![]() 被定义为
被定义为![]() ,其中
,其中![]() ,
,![]() 是标准的
是标准的![]() 范数,
范数,![]() 是w的一个子向量,其元素用
是w的一个子向量,其元素用![]() 中的指数表示。因为结构稀疏性不是体素而是系数所需要的,所以
中的指数表示。因为结构稀疏性不是体素而是系数所需要的,所以![]() 是在变换系数
是在变换系数![]() 空间中构造的加权值
空间中构造的加权值![]() 。空间中构造的加权值
。空间中构造的加权值![]() ,
,![]() 在体素空间中旋转。
在体素空间中旋转。
- 欧几里得投影
任何![]() 在
在![]() 上的欧几里得投影由下式定义:
上的欧几里得投影由下式定义:

任何![]() 在
在![]() 上的欧几里得投影由下式可得:
上的欧几里得投影由下式可得:
![]()
其中![]() 是标准的欧几里得范数。仅对C取下文考虑的特殊值时的
是标准的欧几里得范数。仅对C取下文考虑的特殊值时的![]() 感兴趣。
感兴趣。
- C发生系统变化下Π和
 之间的交替投影
之间的交替投影
GAP 算法是一个线性流形和一个加权![]() 之间的欧几里得投影序列,它在规模上发生了系统的变化。让Π上的投影用
之间的欧几里得投影序列,它在规模上发生了系统的变化。让Π上的投影用![]() 表示,在
表示,在![]() 上的投影用
上的投影用![]() 表示。
表示。
GAP算法从![]() (对应的
(对应的![]() )开始,在以下两个步骤之间迭代,直到
)开始,在以下两个步骤之间迭代,直到![]() 在t中收敛。
在t中收敛。
在线性流形![]() 上的投影:
上的投影:
![]() ,
,![]()
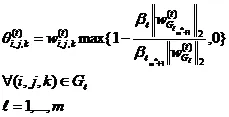
在加权的![]() 投影:
投影:
![]() ,
,![]()
其中,![]() 表示
表示![]() ,是按下式组式给出的:
,是按下式组式给出的:
![]() 是
是![]() 如下形式的排列:
如下形式的排列:
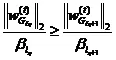
适用于任何![]()
![]() 维度 ,不难验证用于推导
维度 ,不难验证用于推导![]() 解的加权尺寸
解的加权尺寸![]() 由下式表示,取决于对的最新预测:
由下式表示,取决于对的最新预测:
GAP-TV用TV正则化项代替加权![]() 范数的约束项,在简化GAP的同时,实现了GAP的近似性能。TV主要是对于目标内部进行平滑,而在目标边缘进行非平滑的功能,使得重建图像更加平滑并消除伪影。然而,TV正则化仅在模拟对比中对一种视频图像进行验证,仅在固定压缩比下进行评估。对于不同稀疏度和运动的视频压缩感知,还需要大量的实验来进一步证明。此外,仅对二维图像进行TV正则化,可能会导致重建图像的信息丢失或过平滑。
范数的约束项,在简化GAP的同时,实现了GAP的近似性能。TV主要是对于目标内部进行平滑,而在目标边缘进行非平滑的功能,使得重建图像更加平滑并消除伪影。然而,TV正则化仅在模拟对比中对一种视频图像进行验证,仅在固定压缩比下进行评估。对于不同稀疏度和运动的视频压缩感知,还需要大量的实验来进一步证明。此外,仅对二维图像进行TV正则化,可能会导致重建图像的信息丢失或过平滑。
单像素成像将二维空间场景编码后压缩至探测器采集整体强度值,编码通过数字微镜阵列对目标反射光的二值化强度调制实现,这一投影过程可描述为二维场景和编码的哈达玛乘积。理想情况下,DMD对二维场景反射光的被动编码可使用如下数学过程表示:
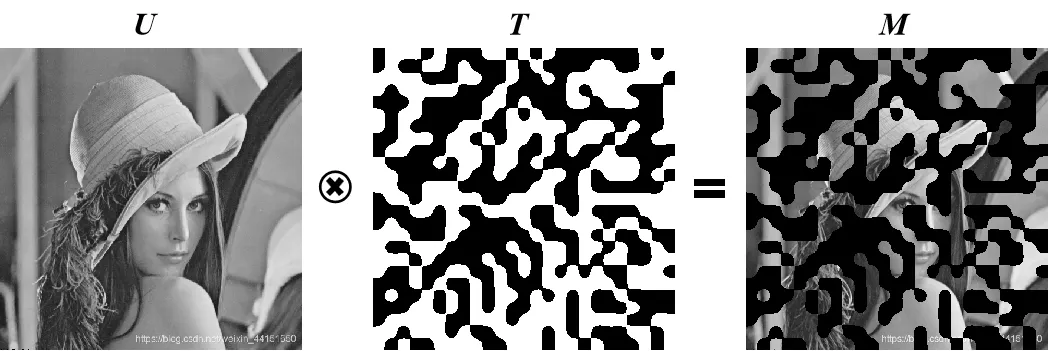
其中,U为二维场景反射光场,通过4f成像投射至二维编码T,叠加得到编码场景M。4f成像通过两个透镜实现,工作原理如图3所示。
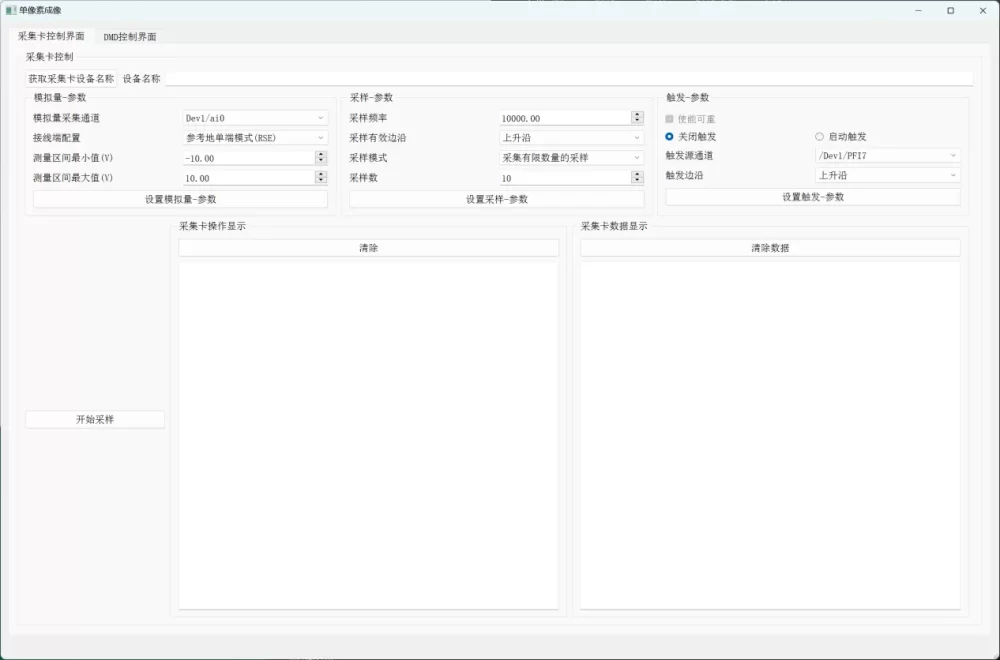

可视化软件操作界面,软件上集成数据采集卡及DLP模组驱动控制,可通过GUI界面进行编码图像加载及投影、硬件触发数据采集卡采集光场强度值并存盘,利用matlab通过压缩感知算法进行重建。
| 名称 | 规格型号 | 单位 | 数量 |
| 超高速数字微镜空间光调制器 | F4320 DDR 0.65 WXGA | 套 | 1 |
| 探测器 | 800~1800nm,增益可调,带放大 | 个 | 1 |
| 可调光阑 | 通光孔直径1~20.5mm,兼容30mm同轴系统 | 个 | 1 |
| 近红外光源 | / | 个 | 1 |
| 透镜套筒 | 长度75mm,带外开槽 | 个 | 1 |
| 数据采集卡 | 500Ksps 16位16 RSE / NRSE通道或8通道DIFF模拟量输入 | 个 | 1 |
| 支架 | 含底板、接杆、杆架、叉块、橡胶底座、同轴垂直转接板、同轴板、L型支架、夹持件、夹持器 | 套 | 1 |
| 工具 | 面包板把手 | 套 | 1 |
| 双凸透镜 | f=50mm | 个 | 1 |
| 双凸透镜 | f=100mm | 个 | 1 |
- 低干扰性:不主动发射信号进行照明成像,在一些特殊场景(如军事侦察、生态监测等)可以减少对目标和环境的干扰,不容易暴露自身的存在和位置。
- 低功耗:相比主动式系统少了发射光源等大功率组件持续工作,系统整体功耗相对较低,有利于依靠电池等有限能源长时间工作或便于小型化设备的能源供应。
- 安全隐蔽:在一些敏感区域或涉及安全保密性要求高的领域,被动式工作模式可以降低被发现和被监测到的可能性。
- 自然环境光利用:可利用自然存在的星光、月光、大气辉光等作为成像的光信号来源,在夜间等低可见光照环境下也有机会成像。
- 穿透能力相对较好:在烟雾、霾等恶劣大气条件下成像能力比可见光成像有优势,能够穿透一定的烟雾、薄雾等,对于火灾救援、野外搜救等场景中被动发现目标更有利。
- 高灵敏度:可以检测到相对较弱的短波红外辐射信号,对低光环境下的微弱信号也能感知。
- 一定的识别伪装能力:可以发现一些在可见光下被伪装的目标,比如可以穿透某些特殊的伪装材料等。
- 对温度变化相对不敏感:与中长波红外成像依赖目标热辐射不同,其受温度变化导致的场景干扰相对小。
- 系统硬件相对简化:不需要复杂的面阵探测器阵列等昂贵且复杂的成像感光元件,降低了硬件成本、体积和重量等。
- 灵活性:在一些对成像系统尺寸、重量有严格限制的应用场景(如空间探测、便携设备)中更具灵活性和可部署性。
- 数据采集维度简化:由于只有一个像素探测器进行数据收集,在数据存储、传输等方面(在原始数据阶段)比大规模阵列数据要简单和高效一些(当然后续数据处理有一定复杂性)。


